
Einparkhilfe
Das Auto rückwärts einzuparken kann eine schwierige Sache sein. Mit einen Parksensor im Auto wird es jedoch deutlich leichter. Aber wie funktioniert ein solcher Helfer?
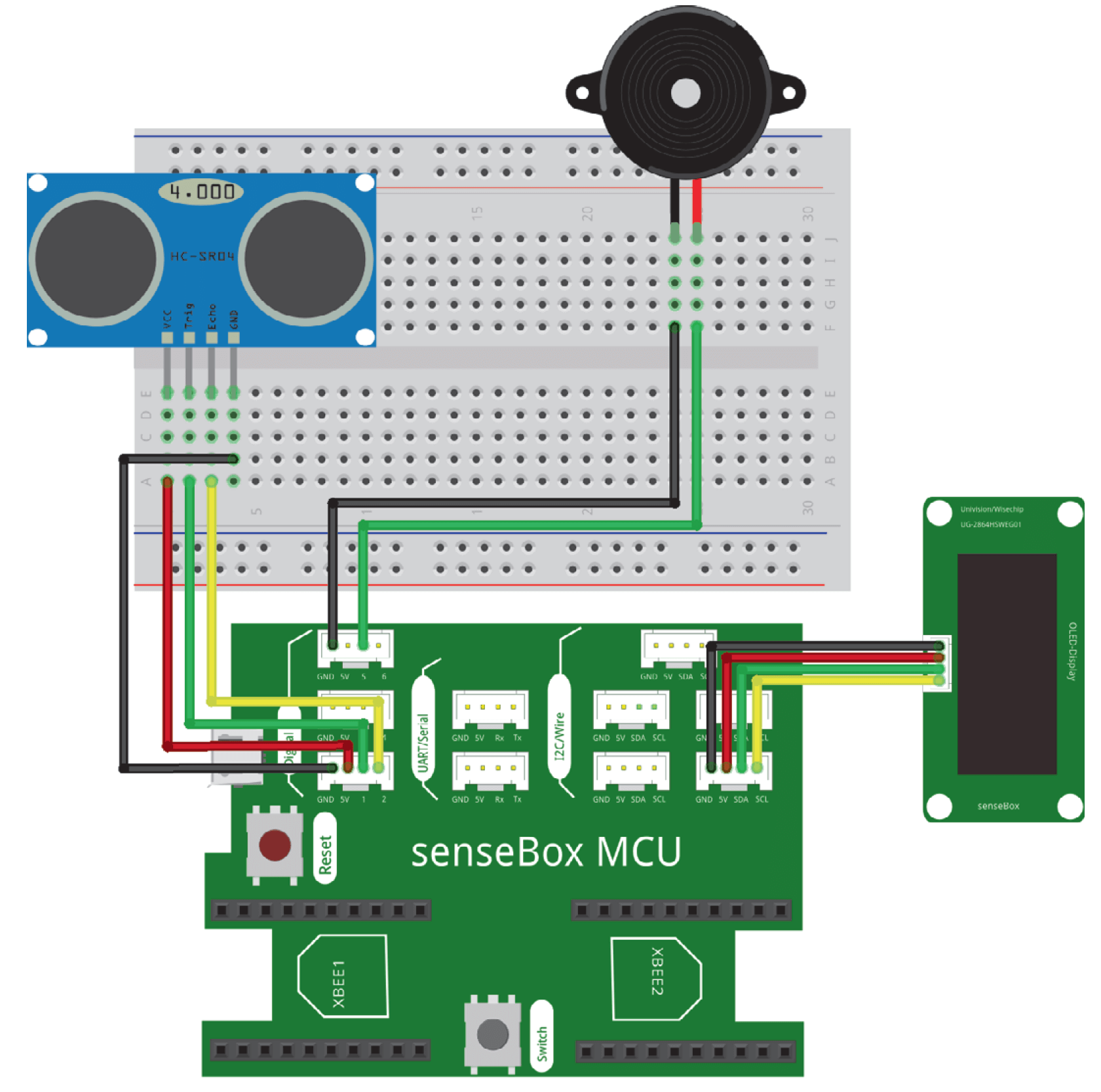
Aufbau
Der Ultraschallsensor wird auf das Breadboard gesteckt und mit Hilfe des Adapterkabels an einen Digital/Analog Port angeschlossen. Das schwarze Kabel wird mit dem GND Pin des Sensors, das rote Kabel mit dem VCC Pin, das grüne mit dem ECHO Pin und das gelbe mit dem TRIG Pin verbunden. Die Pins des Sensors sind auf seiner Vorder- und Rückseite beschriftet. Am besten schließt du den Sensor so an, dass die Kabel hinter dem Sensor liegen, da sie sonst die Messungen verfälschen können. Der Piezo wird ähnlich wie eine einfarbige LED angeschlossen. Das kürzere Beinchen wird mit dem Minuspol (schwarzes Kabel), das längere Beinchen mit einem digitalen Pin (grünes oder gelbes Kabel) verbunden. Du kannst einen Widerstand vorschalten, dies ist aber nicht nötig und führt nur dazu, dass der Piezo leiser wird.
Programmierung
Das Ziel der Programmierung ist es, eine Einparkhilfe zu kreieren, die umso schneller piept, je näher das Auto an einen Gegenstand heranfährt.
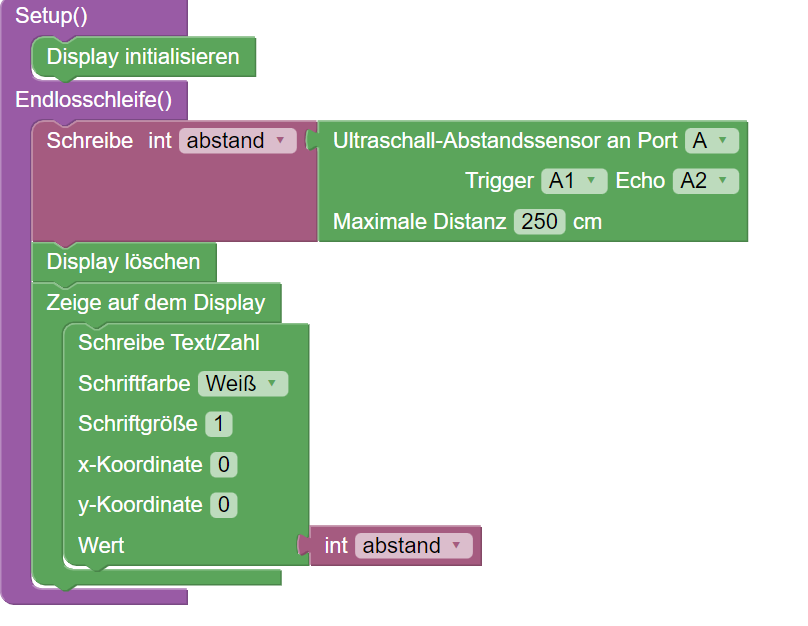
Schritt 1
Um nun eine Einparkhilfe zu programmieren solltest du dir als ersten Schritt die Messwerte des Ultraschallsensors auf dem Display anzeigen lassen. So kannst du nachher besser einschätzen, welche Abstände für deinen Parkhelfer passend sind. Außerdem macht die Arbeit in kleinen Schritten die Fehlersuche deutlich leichter. Verwende dafür eine Variable, die du als bei der Erstellung ‘int’ definieren musst. Um dir die Messwerte anzeigen zu lassen, benötigst du folgende Blöcke:
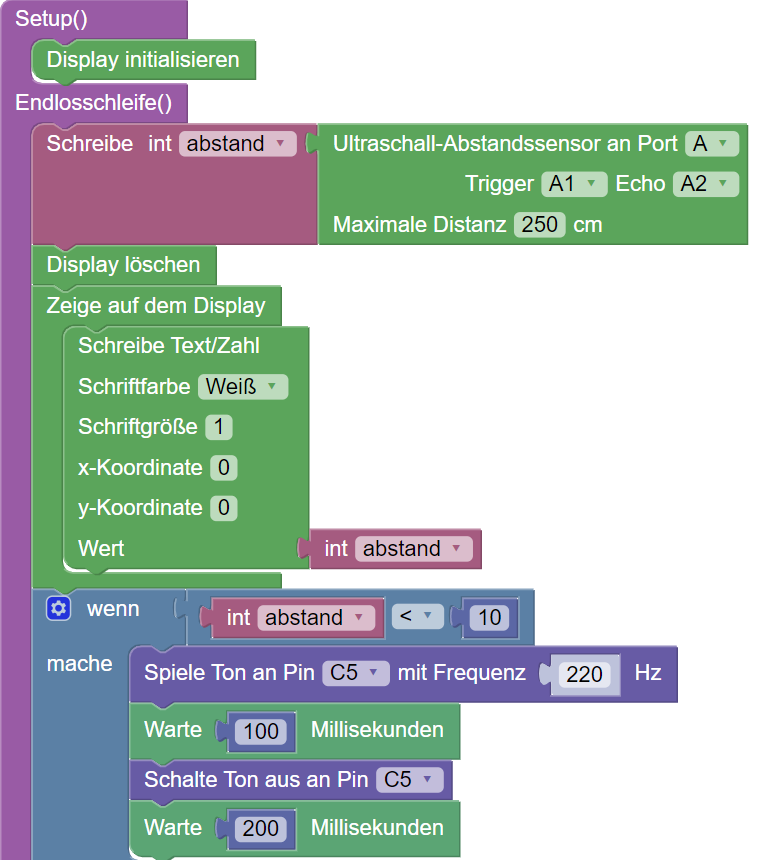
Schritt 2
Wenn dir nun die Messwerte angezeigt werden, folgt der nächste Schritt. Du musst Entscheidungen hinzufügen, die festlegen, wie schnell bei welcher Entfernung gepiept werden soll. Umgesetzt wird dies mit dem „wenn…mache“ Block aus der Kategorie Logik. Als erstes fängst du am besten mit einer einzelnen Bedingung an, die den Piezo dann piepen lässt, wenn die gemessene Distanz kleiner als 10cm ist.
Schritt 3
Nun musst du noch weitere Entscheidungen hinzufügen, sodass sich die Frequenz des Piepens je nach Entfernung verändert. Dazu kannst du mit dem Zahnrädchen oben links im „wenn mache“ Block weitere Entscheidungen hinzufügen. In diesen solltest du dann die Wartezeit nach dem Piepen, sowie die jeweilige Distanz anpassen. Außerdem brauchst du noch den „und“ Block aus der Kategorie Logik, um für die mittlere und letzte Bedingung die Anfags- und Enddistanz festzulegen. Am Ende muss der Piezo ausgeschaltet werden, wenn das Auto weit genug von einem Gegenstand entfernt ist.
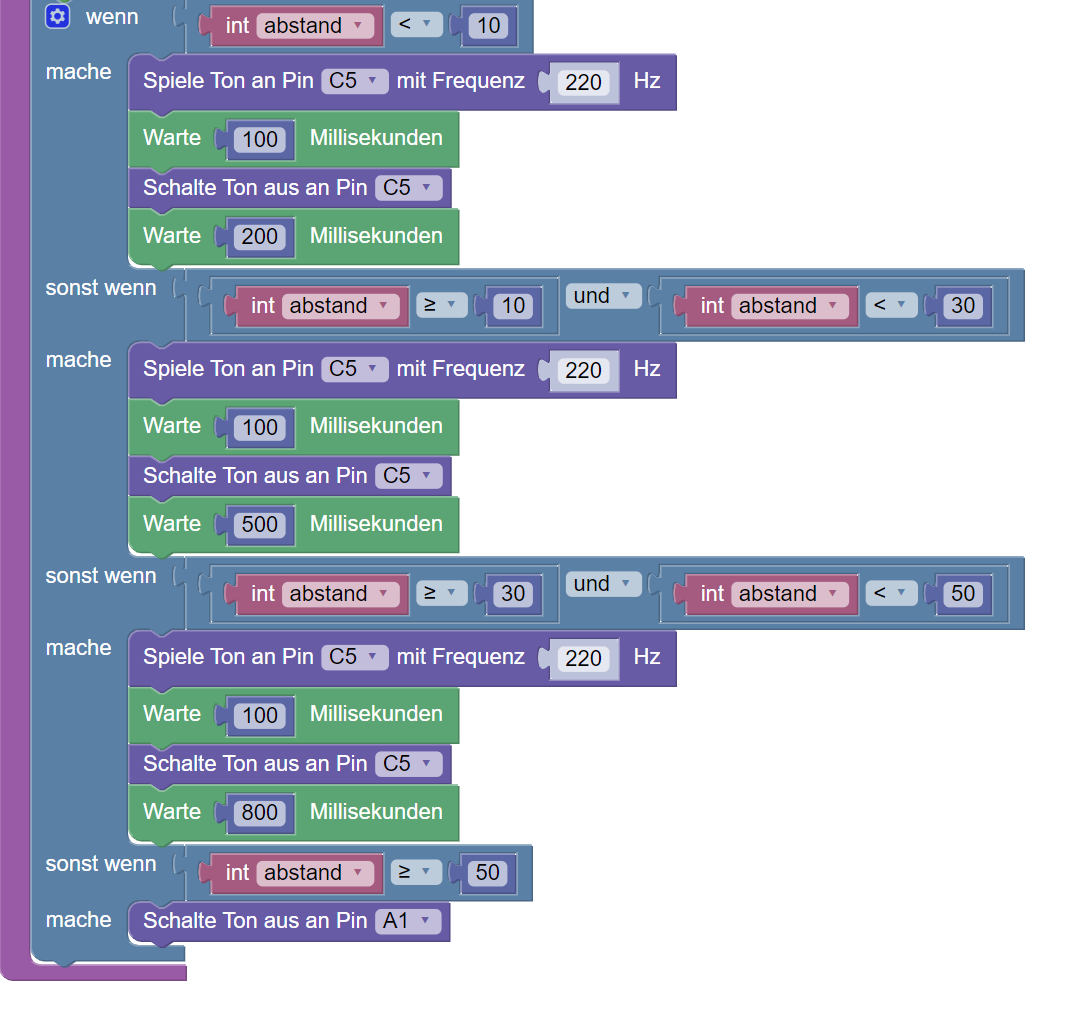
Gesamter Code
Den gesamten Code in Blockly findest du hier.